Capteur Tension 
A partir du gestionnaire de batterie SMARTSHUNT de Victron, écrire une phrase nmea0183 pour afficher la tension des batteries servitude et moteur sur différents supports (en plus de la connexion bluetooth)...

Le SmartShunt 500A/50mV est un contrôleur de batterie tout-en-un, mais sans écran ; c'est le téléphone ou la tablette qui sert d'écran.
Le SmartShunt 500A/50mV se connecte par Bluetooth à l'application VictronConnect installée sur le téléphone (ou la tablette), et il est ainsi possible de lire aisément tous les paramètres de batterie qui sont sous surveillance comme par exemple l'état de charge, l'autonomie restante, l'information historique et bien plus encore...
C'est bien plus pratique que l'écran minuscule qui équipe les contrôleurs de batterie classiques ; au port ou par nav' très calme, on lit facilement les données sur le téléphone.
Par contre, dès que cela bouge un peu, je ne me vois pas sortir mon smartphone ou utiliser une tablette android (l'application VictronConnect ne tourne pas sur les PC et donc sur ma tablette PC).

Lors de mes nav' en solitaire (et pas seulement), j'aime bien savoir où j'en suis au niveau de la batterie servitude.
![]()
Ceci étant, installer un afficheur dédié à la table à cartes ne me convient pas, autant récupérer les données en format NMEA0183 sur mon PC...
En connectant deux câbles sur la sortie VE Direct, il est possible de récupérer les données collectées par le smartshunt.
Connecter le TX du smartshunt sur le RX de MEGA et le neutre sur le TX du MEGA (Serial3 indiqué pour exemple, à préciser dans le sketch arduino)
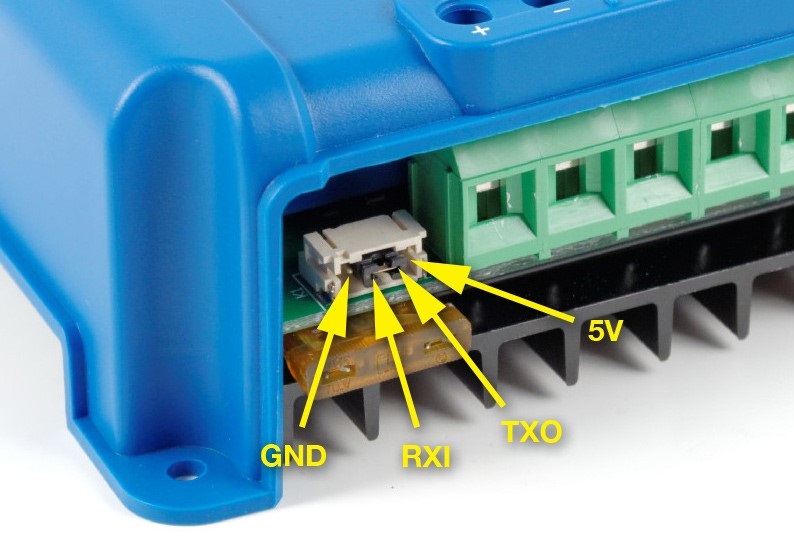
| SMARTSHUNT | ARDUINO MEGA |
| TX (3ème fil) | RX3 |
| NEUTRE (1er fil) | TX3 |
Une petite bidouille arduino et hop, il est possible de créer une phrase NMEA spécifique et donc de l'envoyer sur OpenCPN et d'autres supports...
Extrait du programme Arduino_Fuel dans lequel se trouve le programme pour afficher la tension de la batterie moteur et servitude
En déclaratif
// BATTERIE
#include "VEDirect.h"
float tensionbat0;
float tensionbat1;
float puissance;
float courant;
// 32 bit ints to collect the data from the device
int32_t VE_soc, VE_power, VE_voltage, VE_voltage_moteur, VE_current;
// VEDirect instantiated with relevant serial object
VEDirect myve(Serial2);
dans le SETUP
Serial2.begin(38400); // entrée SmartShunt
dans void LOOP
//************************************************************
// PHRASE NMEA POUR BATTERIE(S) EN XDR
//************************************************************
// PHRASES NMEA issues du plugin Enginedata (pour servir directement dans le plugin et/ou dans le DASHBOARD d'OpenCPN qu'il faudra dans ce cas modifier)
// BATTERY#0 => (Moteur), BATTERY#1 => (Servitude)
// $IIXDR,U,12.56,V,BATTERY1*1F
// $IIXDR,U,13.54,V,BATTERY0*1D
// **** BATTERY#1 => (Servitude) VE_VOLTAGE tension1 *****
char batterieSentence1 [35];
PString strbat1(batterieSentence1, sizeof(batterieSentence1));
strbat1.print("$IIXDR,");
strbat1.print("U,");
strbat1.print(tensionbat1,2);
strbat1.print(",V");
strbat1.print(",BATTERY1*");
cst = checksum(batterieSentence1);
if (cst < 0x10) strbat1.print('0');
strbat1.print(cst, HEX);
Serial.println(batterieSentence1);
Serial3.println(batterieSentence1);
// **** BATTERY#0 => (Moteur) VE_VOLTAGE_MOTEUR tension0 *****
char batterieSentence0 [35];
PString strbat0(batterieSentence0, sizeof(batterieSentence0));
strbat0.print("$IIXDR,");
strbat0.print("U,");
strbat0.print(tensionbat0,2);
strbat0.print(",V");
strbat0.print(",BATTERY0*");
cst = checksum(batterieSentence0);
if (cst < 0x10) strbat0.print('0');
strbat1.print(cst, HEX);
Serial.println(batterieSentence0);
Serial3.println(batterieSentence0);
//*********************************************************
// LECTURE TENSION BATTERIE
//*********************************************************
void resteVolt() <==== N.B.: à supprimer si pas de déclaration d'appel dans le loop et donc supprimer 2 accolades
{
// Read the data
if(myve.begin()) { // test connection
VE_soc = myve.read(VE_SOC);
VE_power = myve.read(VE_POWER);
VE_voltage = myve.read(VE_VOLTAGE);
VE_voltage_moteur = myve.read(VE_VOLTAGE_MOTEUR);
VE_current = myve.read(VE_CURRENT);
} else {
Serial.println("Rien trouvé pour la batterie...");
//while (1);
}
// BATTERIE SERVITUDE
String myString = String(VE_voltage);
int length1 = myString.length();
if (length1 > 4){
tensionbat1 = VE_voltage*0.001;
}
else if (length1 == 4)
{
tensionbat1 = VE_voltage*0.01;
}
else if (length1 == 3)
{
tensionbat1 = VE_voltage*0.1;
}
else if (length1 == 2)
{
tensionbat1 = VE_voltage;
}
// BATTERIE MOTEUR
String myString0 = String(VE_voltage_moteur);
int length0 = myString0.length();
if (length0 > 4){
tensionbat0 = VE_voltage_moteur*0.001;
}
else if (length0 == 4)
{
tensionbat0 = VE_voltage_moteur*0.01;
}
else if (length0 == 3)
{
tensionbat0 = VE_voltage_moteur*0.1;
}
else if (length0 == 2)
{
tensionbat0 = VE_voltage_moteur;
}
//*************************************************************
String myString2 = String(VE_current);
int length2 = myString2.length();
if (length2 > 3){
courant = VE_current*0.001;
}
else if (length2 > 2 && length2 <= 3)
{
courant = VE_current*0.01;
}
else if (length2 == 2)
{
courant = VE_current*0.1;
}
else if (length2 == 1)
{
courant = 999;
}
}
Fonction supplémentaire (hors setup et loop)
// ********************************************
// Calcul du CHECKSUM
// ********************************************
byte cs;
byte checksum(char* str)
{
cs=0;
for (unsigned int n = 1; n < strlen(str) - 1; n++)
{
cs ^= str[n];
}
return cs;
}
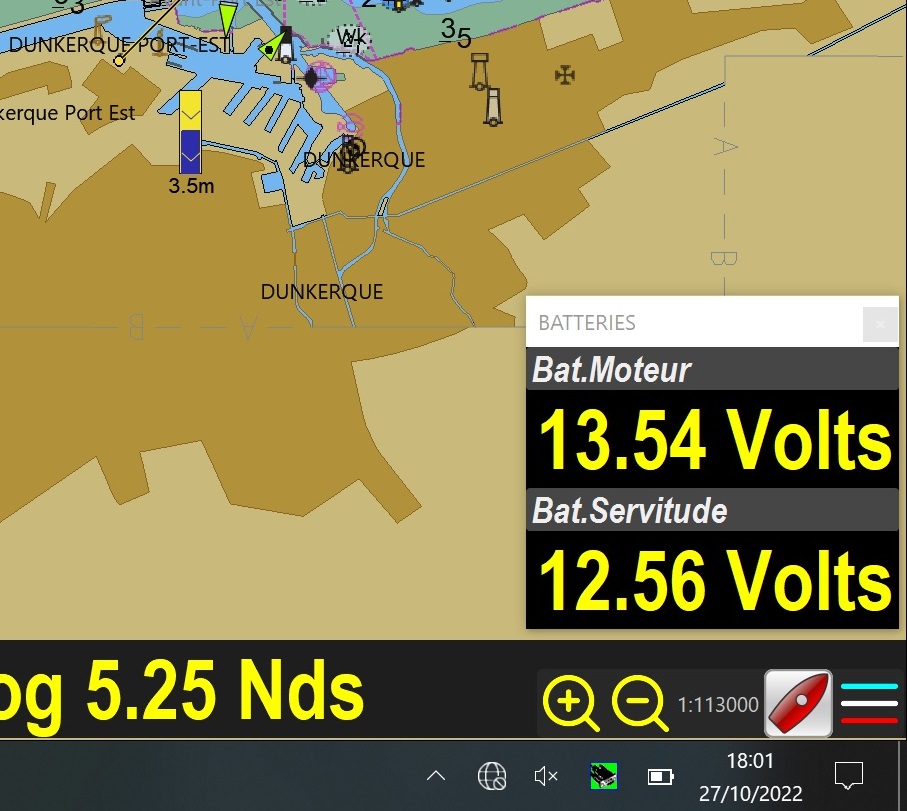
Il m'a été nécessaire de modifier le Dashboard d'OpenCPN pour afficher la tension des batteries moteur et servitude.
A noter que l'affichage de la batterie moteur ci-dessous n'est là que pour l'illustration. Cela ne sert à rien lors des sorties, cette batterie étant censée être chargée à bloc, je ne m'en sers pas...
Toutes les illustrations sont agrandissables...

Article non encore finalisé..